Outsource polyline annotation to HabileData for precise linear feature labeling that trains autonomous driving perception models, GIS mapping systems, and infrastructure monitoring AI. Our annotation team traces lane markings, road boundaries, utility lines, railway tracks, and pipeline routes with sub-pixel vertex accuracy, delivering datasets in OpenDRIVE, GeoJSON, and CVAT-compatible formats that integrate directly into your ML training pipeline.
Start a free polyline annotation pilot »
When lane detection drifts at highway speed or GIS mapping misaligns road centerlines, the failure originates in polyline annotation quality, not the model.
Most annotation providers treat polyline labeling as a generic image labeling task. HabileData does not. When you outsource polyline annotation services to our team, every project begins with documented annotation guidelines that specify minimum vertex density per curve radius, maximum permissible deviation from ground truth in pixels, lane class taxonomies covering solid, dashed, double, and Botts’ dots markings, and explicit estimation protocols for low-visibility edge cases like faded paint, night driving, and construction zone overrides.
Path geometry, not bounded area – why polyline is a distinct technique
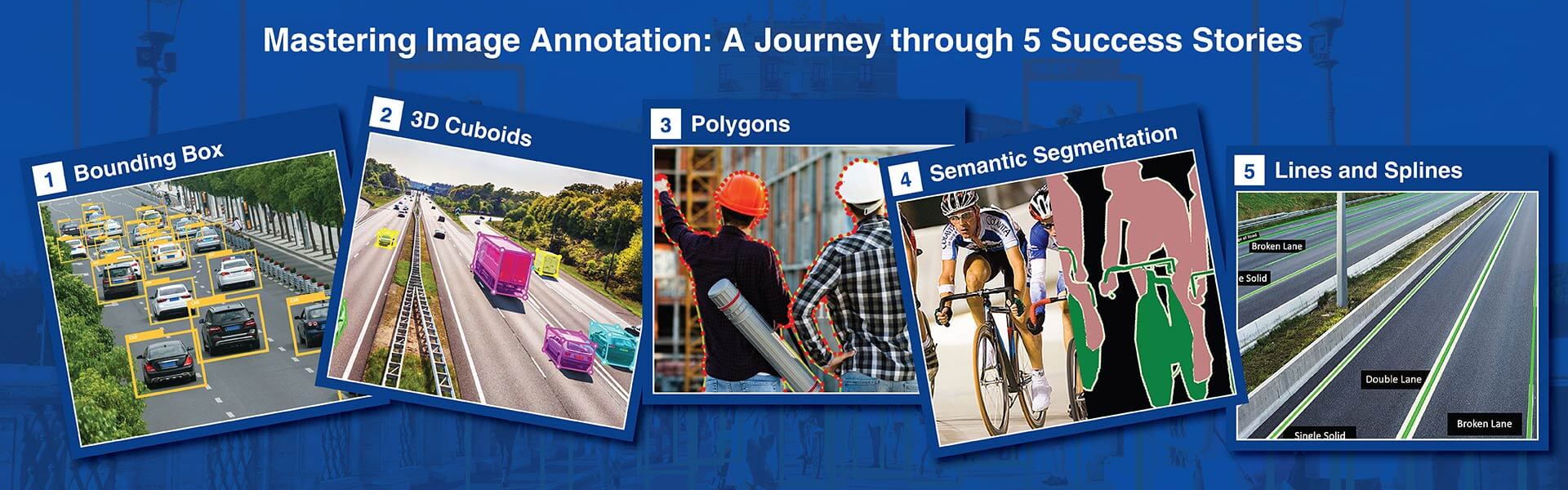
Sequential connected vertices along lane markings, road boundaries, railway tracks, power lines, and pipeline routes create open-ended lines capturing path geometry, direction, and curvature. Unlike polygon annotation which encloses area, polyline traces features where the path matters more than any bounded region. Choosing the wrong technique produces unusable training data.
Vertex density, deviation limits, and lane taxonomies – documented before labeling
Every project begins with guidelines specifying minimum vertex density per curve radius, maximum permissible deviation from ground truth in pixels, lane class taxonomies covering solid, dashed, double, and Botts’ dots markings, and explicit estimation protocols for faded paint, night driving, and construction zone overrides.
300+ annotators on CVAT, Labelbox, and V7 Darwin – three-stage QA per frame
Our 300+ trained annotators execute inside CVAT, Labelbox, and V7 Darwin with three-stage quality validation on every frame. We deliver in OpenDRIVE, GeoJSON, TuSimple, CULane, KITTI, Shapefile, or your custom JSON schema – matched to your pipeline at no additional cost.
Output matched to your pipeline – OpenDRIVE, GeoJSON, KITTI, or custom schema
OpenDRIVE for HD maps. GeoJSON for geospatial platforms. TuSimple, CULane, and KITTI for lane detection benchmarks. Shapefile for government mapping systems. Or your custom JSON schema – configured before the project begins and matched to your autonomous driving, GIS, or infrastructure pipeline at no additional cost.
We deliver the full range of annotation capabilities for this technique – each configured to your specific ML framework and output requirements.
Left and right lane boundaries annotated as independent polylines with consistent point ordering. Merge zones, stop lines, crosswalk boundaries, and yellow centre-line annotations included in the class taxonomy. Output compatible with OpenDRIVE and Apollo HD map compilation pipelines. Polyline density calibrated to road curvature – more annotation points on curves, fewer on straight sections.
Infrastructure polylines on aerial and satellite imagery: road networks, utility corridors, pipeline routes, rail lines, shorelines, and river boundaries. GPS coordinate output with metadata. Attribute labels per line segment (infrastructure type, material, status). Compatible with GeoJSON, Shapefile, and standard GIS pipeline formats.
Traffic management route annotation for AI systems that predict vehicle flow, optimise signal timing, and model route options. Route polylines annotated with direction, speed limit, turn restriction, and access class attributes. Used for traffic simulation training data and urban mobility AI.
Utility network tracing (gas, water, telecoms) from aerial imagery, electrical cable routing in industrial facility imagery, and pipeline infrastructure annotation from survey data. Industrial AI training datasets for infrastructure monitoring and predictive maintenance.

Our annotators understand the technical distinction between polyline and polygon annotation and apply the correct technique for each use case. Using polygon annotation for lane marking produces incompatible output for HD map compilation. We document the annotation type decision in the project guidelines before any work begins.
We brief annotators on the specific lane marking conventions for OpenDRIVE and Apollo HD map formats before any road annotation begins. Convention errors in HD map annotation are not visible in visual quality review — they only surface when the compiled map fails geometry validation.
We deliver in pixel, normalised, or GPS coordinate format depending on your downstream application. For GIS and HD map output, positional accuracy is calibrated to your source imagery resolution and target application precision requirement.
Polyline annotation on RGB camera imagery, LiDAR projected images (range and intensity maps), thermal imagery, and multispectral imagery. Sensor-specific annotation protocols written per project.
For GIS and infrastructure polyline annotation, we apply topology validation before delivery to ensure all line segments are connected, no isolated fragments exist, and network continuity is maintained throughout the dataset.





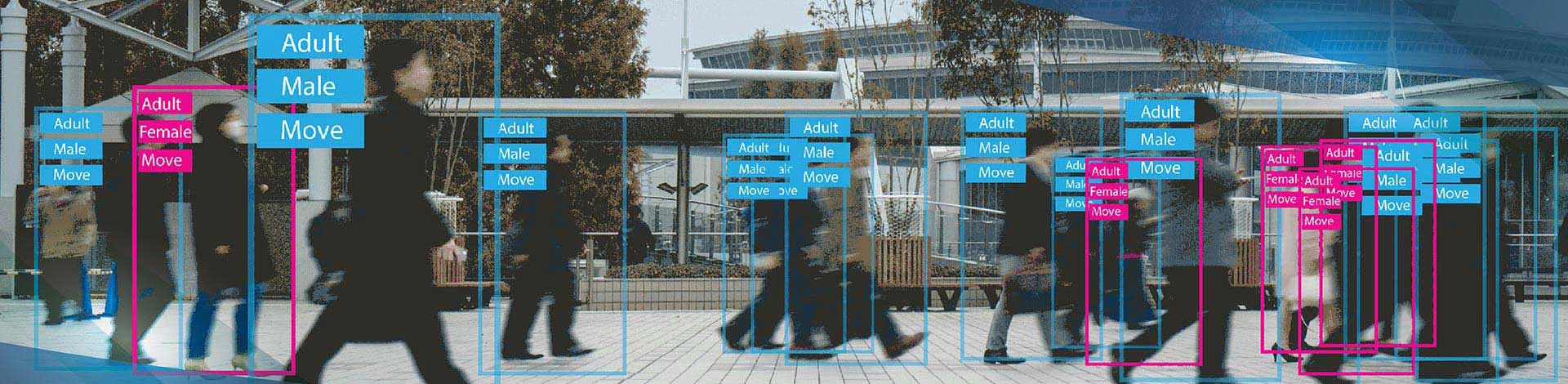
Polyline annotation places sequential connected points along a linear feature in an image or video frame to trace its path. Unlike polygon annotation, polyline creates an open-ended line where the first and last points do not connect. This technique labels lane markings, road boundaries, utility lines, railway tracks, cracks, and rivers for training computer vision models that need to detect and follow linear features.
Polyline annotation traces open-ended linear features where path and direction matter more than enclosed area. Polygon annotation creates closed shapes enclosing area around objects. Use polylines for lanes, roads, wires, and cracks. Use polygons for vehicles, buildings, and products. Many AV datasets use both within the same scene.
We deliver in OpenDRIVE (.xodr) for HD maps, GeoJSON LineString for GIS, Shapefile for government systems, TuSimple and CULane benchmark formats, KITTI lane format, CVAT XML/JSON, and custom schemas. All geospatial formats include coordinate reference system metadata.
CVAT for video lane annotation with polyline interpolation, Labelbox for collaborative projects with programmatic QA, V7 Darwin for AI-assisted annotation, Scale AI for high-volume standardized projects, and proprietary platforms when required. We onboard to new tools within 48 hours.
99.5% vertex placement accuracy within 2 pixels of ground truth on standard lane projects. 97%+ on low-visibility conditions using documented estimation protocols. Every delivery includes a quality report with vertex accuracy metrics for independent validation.
A team of 20 annotators processes 10,000 images in 5 to 7 business days. Video projects use keyframe interpolation to accelerate throughput by 40 to 60 percent. Detailed timelines provided after sample review during the free pilot phase.
Pricing depends on feature complexity, point density, image count, lane taxonomy, and quality tier. We provide per-image and per-feature quotes after reviewing sample data. No setup fees, no minimums, and a free pilot to evaluate quality before commitment.

Disclaimer: HitechDigital Solutions LLP and HabileData will never ask for money or commission to offer jobs or projects. In the event you are contacted by any person with job offer in our companies, please reach out to us at info@habiledata.com.